

 English
English 中文
中文


Call Us Now
TEL: +86 13386078659; Skype ID: Hanwei; WeChat: +8613386078659; QQ ID: 413882258.



Item No.:
TR-CL580Payment:
FOB/CIFProduct origin:
ChinaColor:
WhiteShipping port:
ShangHaiLead Time:
7
TEL: +86 13386078659; Skype ID: Hanwei; WeChat: +8613386078659; QQ ID: 413882258.
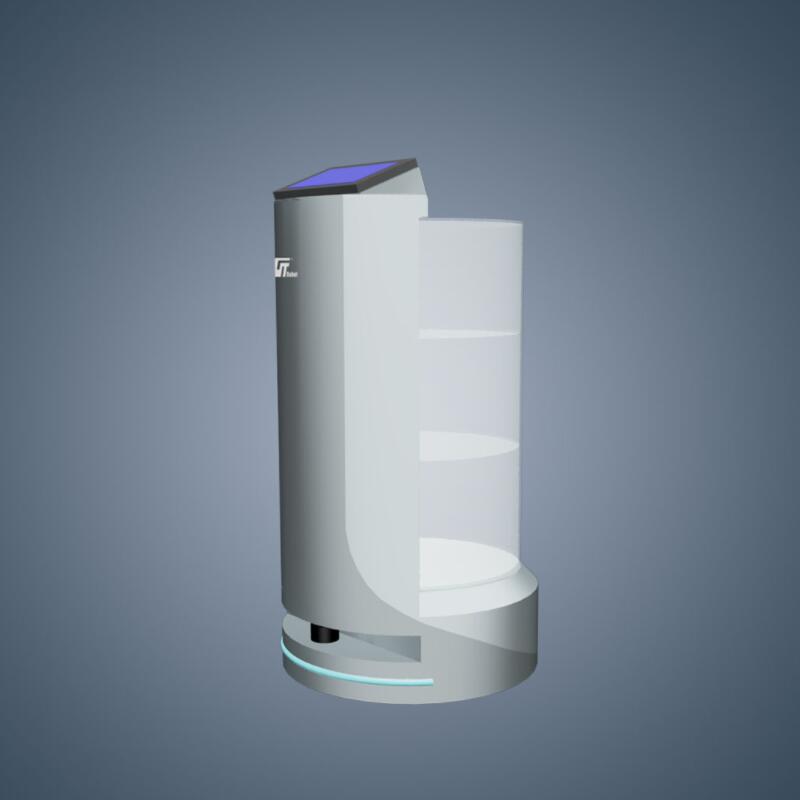
TR-CL580 Commercial Floor Scrubbing Robots
")
TR-CL580 is a commercial floor scrubbing robot that integrates floor scrubbing, decontamination and drying. It has such functions as auto spraying, pre-filtration, auto floor scrubbing, auto sewage recycling, floor drying, auto water replenishment, auto charging, etc.
It automatically performs tasks through autonomous driving technology, and multi-sensor fusion provides adequate protection for on-site personnel and inherent layouts. The externally provided circulating hydropower station can realize automatic water replenishment and charging. With elevator control, it realizes operation in different floors. Users can remotely monitor machine data and schedule work in the background, so as to carry out floor cleaning service more scientifically and effectively.
")
Scrubing:
by spraying clean water on the floor, the disc brush contacts the ground and rubs under a certain pressure (about 10kg) to clean the floor, while the suction squeegee takes away the water stains to make the ground clean as new. The built-in water circulation filtration system can purify the sewage and work in a closed loop .
Refurbishment:
The stone is polished by different disc brushes (800mesh / 1500mesh / 3000mesh /6000 mesh) under a certain pressure (about 30kg) to improve the glossiness of the stone surface.
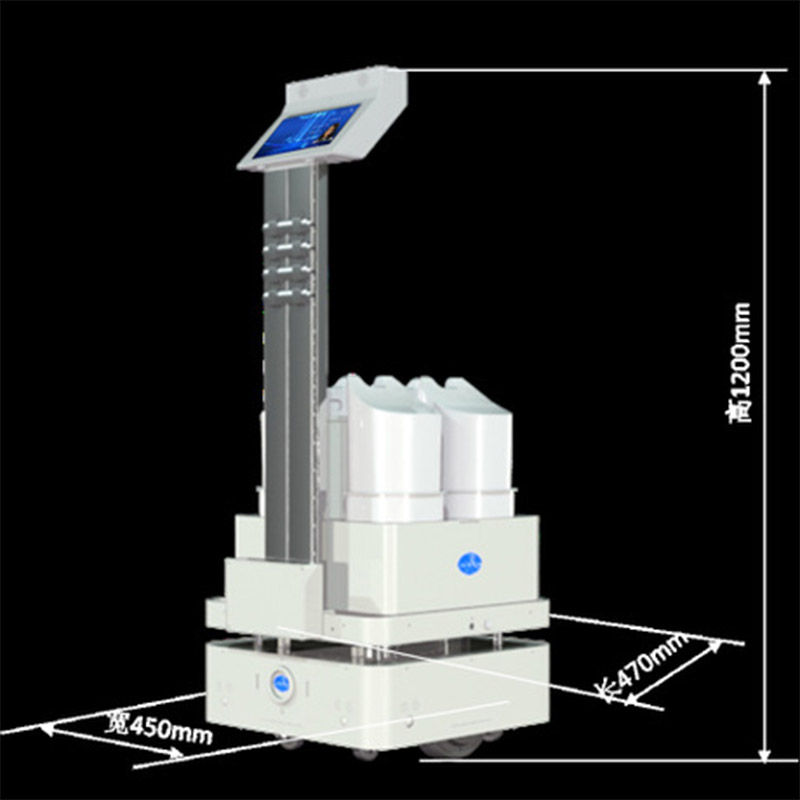
") Robot Features:
Robot Features:
1.It integrates the functions of stone refurbishment, floor scrubbing, decontamination and drying
2.Quick charging of 1.5 hours meets the requirements of multi-shift operation
3. A built-in water circulation filtration system is provided, where the sewage flows through the system and is then intercepted, stratified and decontaminated for purification
4.A circulating hydropower station is provided externally for auto water replenishment, auto water discharge, auto charging and unlimited endurance
5.With 460mm cleaning width, auto spraying, pre-filtration and sealing squeegee strip, it cleans efficiently without leaving marks
6.1#-4# disc brushes can realize the shallow refurbishment of marble and granite, making the stone gloss up to 75 degrees
7.The cylindrical body provides safety for edge-sweeping and zero-turning radius navigation and obstacle avoidance
8.The noise of the suction fan is effectively handled. While the suction is maintained, the operating noise of the whole machine is controlled within 70dBA.
9.Customized 3D laser + 3D depth of field ToF camera + 2D laser + ultrasonic and anti-drop sensor fusion
10.Multi-level human-machine management platform (site tablet APP, on-board UI)
11.The main control and chassis control boards are all independently designed, with CAN bus structure, stable performance and convenient electronic control maintenance
12.Safety regulations and EMC system comply with CR/CE.
") External circulating hydropower station
External circulating hydropower station
Auto water replenishment, auto charging and unlimited endurancel
510mm cleaning width
Auto spraying, pre-filtration, floor sweeping, sewage recycling, drying
Elevator control
Autonomous linkage of electrical appliances to achieve cross-floor operations.
*Built-in water circulation filtration system (clean water tank 36L, sewage tank 20L)
*The sewage flows through the system and is then intercepted, stratified and decontaminated for purification
*Uninterrupted normal water supply, continuous operation, stable and reliable performance
*Greatly reduce the frequency of water replenishment, saving water, electricity and energy.
")
Principle and advantages of ToF camera:
The imaging equipment using ToF technology is called ToF camera. The vision imaging process of ToF camera is similar to ordinary machine, which is composed of light source, optical components, sensor (ToF chip), control circuit and processing circuit. This technology works in much the same way as a 3D laser sensor, except that the 3D laser sensor scans point-by-point, whereas the ToF camera gets depth information about the entire image at the same time.
1.Compared with 2D images, ToF camera can obtain richer position relations between objects through distance information, that is, the foreground and the background can be distinguished;
2. The depth information can still be used to segment, mark, recognize and track the target image;
3.After further processing, 3D modeling and other applications can be completed.
4.It can quickly complete the target identification and tracking;
5.With the characteristics of CMOS, a large amount of data and information can be obtained, which is very effective for the attitude judgment of complex objects.
6. No need for scanning equipment to assist the work.
") 3D multi-line laser radar
3D multi-line laser radar
•It is mainly used in autonomous vehicle environment sensing, robot environment sensing, UAV mapping and other fields
•By adopting hybrid solid-state laser radar method, it integrates 16-line laser head, with the measuring distance up to 70 meters
•The measuring accuracy is ±5cm, output points up to 320,000 points/sec, horizontal angle measurement 360°, and vertical angle measurement 30°
")
Robot environment perception
•Environmental mapping
Relying on radar and its sensor information processing technology, the robot can immediately see the precise terrain and environmental images of its own position
•Real-time positioning
The local environmental information scanned in real time is continuously matched with the known high-precision maps, so the robot can know exactly where it is
•Obstacle recognition
Reduce the phenomenon of "missed report" and "false report" of obstacles to the robot, so that the robot can maintain the awareness of the environment.
") Obstacle avoidance strategy:
Obstacle avoidance strategy:
*The safety threshold is 150mm on one side
*For far-field recognition, the robot stops one meter away and detours after 3 seconds
@ Rows of single or multiple pedestrian, special-shaped space obstacles, on-site layouts, space studs, glass screens, etc.
*Low object recognition and bypass
@ 15cm or above low objects: Recognize in a range of 6m of luggage carts, low stools, flower pots, translucent 500ml beverage bottles, etc.
*Sudden entry object recognition and emergency stop
@ Stop in 0.2s above 15cm near field.
") The five-layer protection system against falling consists:
The five-layer protection system against falling consists:
*First barrier: Virtual wall
*Second barrier: When the real-time position does not match with the preset map position after several corrections (i.e. location lost), the upper-layer application will issue the in-situ stop command to the robot
*Third barrier: If the bottom control board MCU receives no data, the strategy is to automatically reset every second
*Fourth barrier: If the driving controller receives no data from the bottom MCU, it will lock the driving wheel
*Fifth barrier: If the above barriers fail, the anti-fall sensor is the final barrier (The probability of triggering the robot to wander is 0.01% under auto mode, which is only caused by broken harness. In this case, the robot will spin in situ, or there is no space height difference when scanning the map. The height difference will appear after remapping)
*The installation position of anti-drop sensor is on the side of 2D laser with injection angle of 45%. ToF ranging is adopted to judge the height difference above 10cm and trigger the stop.
*Regardless of the suitability test of multiple ground types and distances of the module or pressure field test over 1000 times, it can stop immediately within 0.1 second at 0.5m/s (the preset maximum travel speed of autonomous navigation), and the front universal wheel does not slip out.
")

Chengying——Ultraviolet disinfection robot Sterilization is efficient, safe, and pollution-free Signify UV-C UV light source, new coronavirus (COVID-2019) The i...

*Equipped with visual positioning, depth vision camera, lidar*Precise positioning and navigation of walking routes, autonomou

The Inspection Robot uses highly intelligent robot technology and image recognition technology to replace the manual completi

Autonomous navigation, flexible obstacle avoidance, routes, trajectories can be set arbitrarily. Cyclic Sweeping & scru

Delivery Robot Features: Body length/width/height: 3650*1560*1950mm Vehicle equipment quality: 770kg Maximum load:

Robot Street Sweeper Specification: Cleaning width: 1900mm Volume: 230L Maximum travel speed: 60kg/h Water tank capacity: 80L

AI Coffee Robot Specifications: Robot weight: 72KG Base size: 650mm in diameter Movement range: 750mm Clamping type: mechanic
Physical safety system: Far-field protection: ØFar-field 360 150m instant mapping, real-time positioning, navigation ability

Multi-layer pallet free combination The number of pallets can be switched freely, open pallets Design, single layer load 10Kg

Robot Mechanical Parameters: Overall dimension: 1150(L) x 730(W) x 1138(H) Net weight: 280kgElectrical parameters: Battery vo

Floor cleaning Robot: It‘s relying on mature SLAM robot autonomous positioning and navigation technology, through the collisi
Intelligent cruise explanation automatically leads the way: *Adopt advanced wireless laser navigation technology to quickly s

Intelligent cruise explanation automatically leads the way: *Adopt advanced wireless laser navigation technology to quickly s

*Multi-degree of freedom bionic arm *Voice interaction + face recognition *Developer Eco + Extension Interface *3D SLAM indoo

UV Disinfection AI Robot is suitable for the hospitals and public venues. Good in control with the virus such as H1N* and CO
It mainly includes two parts: intelligent mobile platform and automatic killing system. The automatic killing system is under













Please read on, stay posted, subscribe, and we welcome you to tell us what you think.
 Online service
Online service +86 13386078659
+86 13386078659 ysb189@163.comyusb@shhanwei.cnhanwei@shhanwei.cn
ysb189@163.comyusb@shhanwei.cnhanwei@shhanwei.cn Hanwei
Hanwei Hanwei
Hanwei 413882258
413882258 +8613386078659
+8613386078659