

 English
English 中文
中文


Call Us Now
TEL: +86 13386078659; Skype ID: Hanwei; WeChat: +8613386078659; QQ ID: 413882258.



Item No.:
TR-4RDM2Payment:
FOB/CIFProduct origin:
ChinaColor:
BlueShipping port:
Shen ZhenLead Time:
15
TEL: +86 13386078659; Skype ID: Hanwei; WeChat: +8613386078659; QQ ID: 413882258.

Mini type Robot Dog is a universal intelligent four-legged robot independently developed by Yunshen. Bionic design, small figure, sensitive movement and rich perception. Based on advanced control algorithms, it has a variety of motion modes such as walking, sliding, jumping, running, backflip, etc.; freely superimposed intelligent modules, capable of autonomous positioning and navigation, real-time obstacle avoidance and visual recognition; user-oriented The design concept adds voice interaction, sound source positioning, and safety and collision avoidance functions to give users a better interactive experience and safety assurance.
Mini type Robot Dog open control and perception protocol is an intelligent robot system platform that can be re-developed. It faces the needs of "new engineering" and is suitable for the theoretical innovation and practical technology application development of intelligent robots, as well as the practical teaching of robotics.

Complex Terrain Based on the accurate terrain perceiving technology and the high distinction in capability of expeditious recovery after missing steps, robot dog succeeds to adapt unstructured terrains e.g. stairs, gravel, ramp, grass etc. and even terrain with obstacles. Technical reliability is guaranteed in omnidirectional intelligent agile mobility during working on the complicated terrains.
Mobility The unprecedented dynamic gait planning and motion control technology allow robot dog to realize various gait type e.g. walk, flying-trot, galloping, pronk etc. even working on the complicated terrains e.g. stairs, ramp, obstacles, gravel, and lawn.
Balancing Robustness is assured based on the high-frequent real-time control system and the algorithm of dynamical balancing. robot dog can recover to balance state under all-directional perturbation. Even under the situation of missing step, the rapid recovering to stability is guaranteed.
High Dynamic Mobility
Robot dog achieves to perform high dynamical gaited motion e.g. Flying-Trot, Bound, Gallop, Pronk and so on due to the powerful performance in joint drive as well as the high dynamical gait planning and control technique.
Intelligent Mobility High-precision SLAM (Simultaneous Localization And Mapping) and navigation techniques allow robot dog to achieve the autonomous locomotion and dynamical obstacle avoidance under various environment indoors and outdoors. With these mounted technologies, the all-round intelligent locomotion is guaranteed.
Interactive Mode
Basedon adequate I/O interfaces and the well-behaved perceptual interactivetechnology, robot dog can access to diverse interactive patterns e.g. Remoter,Touch , Vision, Gesture, and Voice control offering users a better interactiveexperience.
Jumping
By virtue of morphology of bucolical legs design and thepowerful joint drive, the new robot dog is able to jump over 40cmobstacles. The jumping height reaches 70cm and 1.5m range of long jump areavailable.
Auto-recharging
The localization of auto-recharging utilizes the feedback of visual information. Under the assistance of vision system, the robot is lead to the charging zone operating in low speed locomotion. When specified region are arrived, the connection to the charging pile is triggered. With the help of the precise visual locomotion information, the robot will keep calibrating until the ‘done’ state is detected.

Robotic Dog mini TechnicalParameters


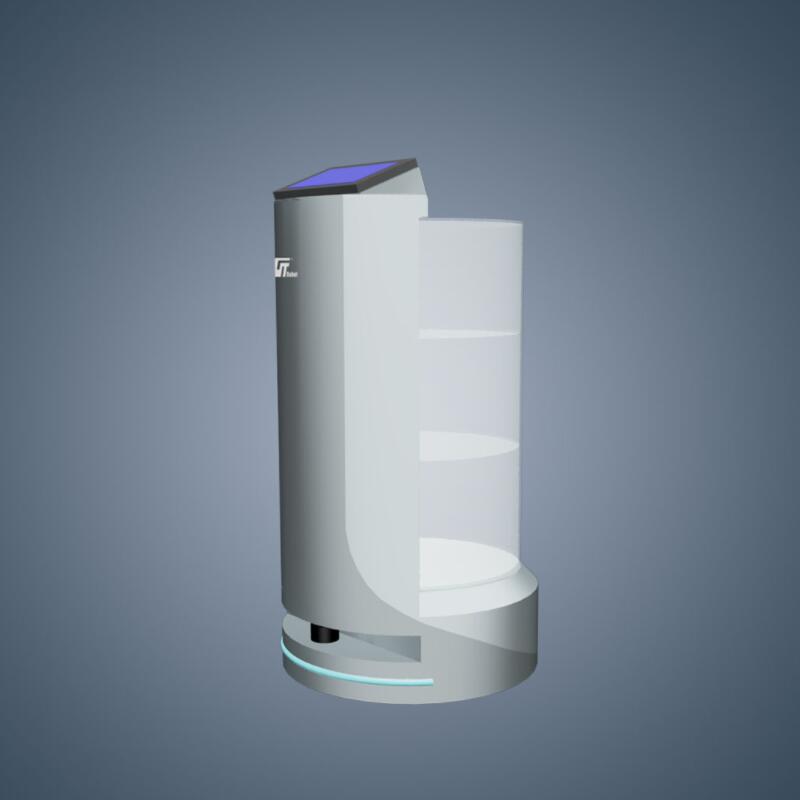
Chengying——Ultraviolet disinfection robot Sterilization is efficient, safe, and pollution-free Signify UV-C UV light source, new coronavirus (COVID-2019) The i...

*Equipped with visual positioning, depth vision camera, lidar*Precise positioning and navigation of walking routes, autonomou

The Inspection Robot uses highly intelligent robot technology and image recognition technology to replace the manual completi

Autonomous navigation, flexible obstacle avoidance, routes, trajectories can be set arbitrarily. Cyclic Sweeping & scru

Delivery Robot Features: Body length/width/height: 3650*1560*1950mm Vehicle equipment quality: 770kg Maximum load:

Robot Street Sweeper Specification: Cleaning width: 1900mm Volume: 230L Maximum travel speed: 60kg/h Water tank capacity: 80L

AI Coffee Robot Specifications: Robot weight: 72KG Base size: 650mm in diameter Movement range: 750mm Clamping type: mechanic

Physical safety system: Far-field protection: ØFar-field 360 150m instant mapping, real-time positioning, navigation ability

Multi-layer pallet free combination The number of pallets can be switched freely, open pallets Design, single layer load 10Kg

Robot Mechanical Parameters: Overall dimension: 1150(L) x 730(W) x 1138(H) Net weight: 280kgElectrical parameters: Battery vo

Floor cleaning Robot: It‘s relying on mature SLAM robot autonomous positioning and navigation technology, through the collisi
Intelligent cruise explanation automatically leads the way: *Adopt advanced wireless laser navigation technology to quickly s

The autonomous mobile robot TR-Max600L based on visual perception has a more dexterous body and can move freely in small spac

SRC-based laser SLAM stacker automatic forklift SFL-CDD20, equipped with SRC series core controller, can identify pallets, fo

The unmanned forklift (AGV) adopts Japanese AGV technology. After years of localization exploration and testing, it now has e

Laser SLAM Small Stacker Automatic Forklift TR-FL140: SRC-based laser SLAM small stacker automatic forklift, equipped with SRC series core controller inside; us...













Please read on, stay posted, subscribe, and we welcome you to tell us what you think.
 Online service
Online service +86 13386078659
+86 13386078659 ysb189@163.comyusb@shhanwei.cnhanwei@shhanwei.cn
ysb189@163.comyusb@shhanwei.cnhanwei@shhanwei.cn Hanwei
Hanwei Hanwei
Hanwei 413882258
413882258 +8613386078659
+8613386078659